

A closer look, very far away: JAXA lands a multispectral imaging robot on asteroid Ryugu
200 hundred million miles away from earth, JAXA has landed on a dark and dusty rock. Why? To find out where we came from.
The landing on the near-earth asteroid Ryugu is a major milestone for Hayabusa2, Japan’s unmanned exploration mission. Launched in December 2014, Hayabusa2 arrived in late June for what will be a year-and-a-half survey. Ryugu is a carbonaceous asteroid, which is the most common type. It contains a large proportion of carbon, which gives it a very low albedo, making it very dark in space and difficult to study from Earth.
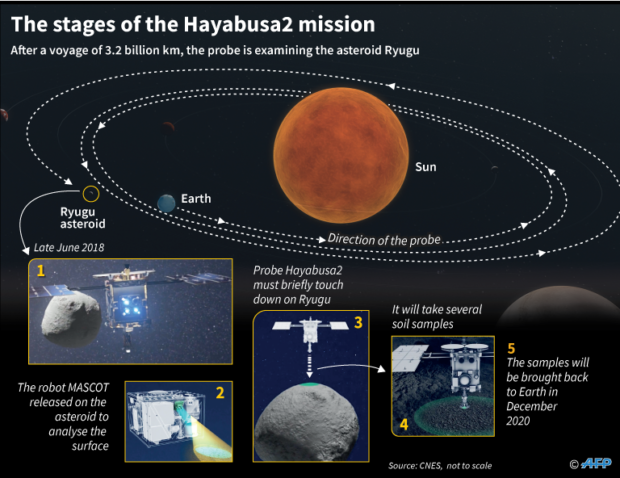
The robot is Mobile Asteroid Surface Scout (MASCOT), provided through a joint effort from the French and German national space agencies (you can follow it on Twitter). It will be using a combination of sensors to measure the composition of Ryugu. Its findings may help us resolve part of the scientific mystery of how life emerged: the origin of the chemical building blocks of life. We don’t yet understand how atoms present on earth formed into more complex molecules.
One option is they didn’t. They could have come from space-based tholins: organic compounds formed by solar ultraviolet irradiation or cosmic rays from simple carbon-containing compounds like carbon dioxide (CO2), methane (CH4) or ethane (C2H6), often in combination with nitrogen (N2). Tholins do not form naturally on modern-day Earth, but they are found in great abundance on the surface of icy bodies in the outer Solar System, and as reddish aerosols in the atmosphere of outer Solar System planets and moons. When in the presence of water, tholins may facilitate the formation of prebiotic chemistry that could lead to the generation of life. Are they common on asteroids? And if so, were the compounds that led to us created by chemical reactions on earth or did they catch rides on meteorites?
It’s rare that we go so far afield to provide answers at home. And with such distances and difficulty, very specialized hardware was needed.

Purpose-built for Asteroid Imaging
MASCOT is designed to provide extremely detailed mineralogical and geological surveys of the asteroid’s surface, using four instruments: MicrOmega – a hyperspectral microscope, MAG – a magnetometer, CAM – a camera, and MARA – a radiometer. The robot will map the asteroid’s geomorphology; the structure, texture and composition of the regolith (dust, soil and rocks), and the thermal, mechanical, and magnetic properties of the surface in order to provide ground truth for the orbiter remote measurements, support the selection of sampling sites, and provide context information for the returned samples.
The instruments will allow analysis at scales impossible from any farther away, ranging from tens of meters to a fraction of a millimeter, by means of multi-color imaging of the asteroid’s surface. Imaging will start after the robot separates from Hayabusa2 and will continue until touchdown, allowing scientists to close the gap between the orbital images it already has, and the detailed surface imaging it will acquire.
After touchdown, the camera will acquire wide-angle images of the asteroid’s surface. From these images, surface features will be mapped on scales ranging from meters down to a few millimeters, allowing characterizing of the surface in terms of regolith physical properties, texture, morphology, particle size distribution, and microcraters.
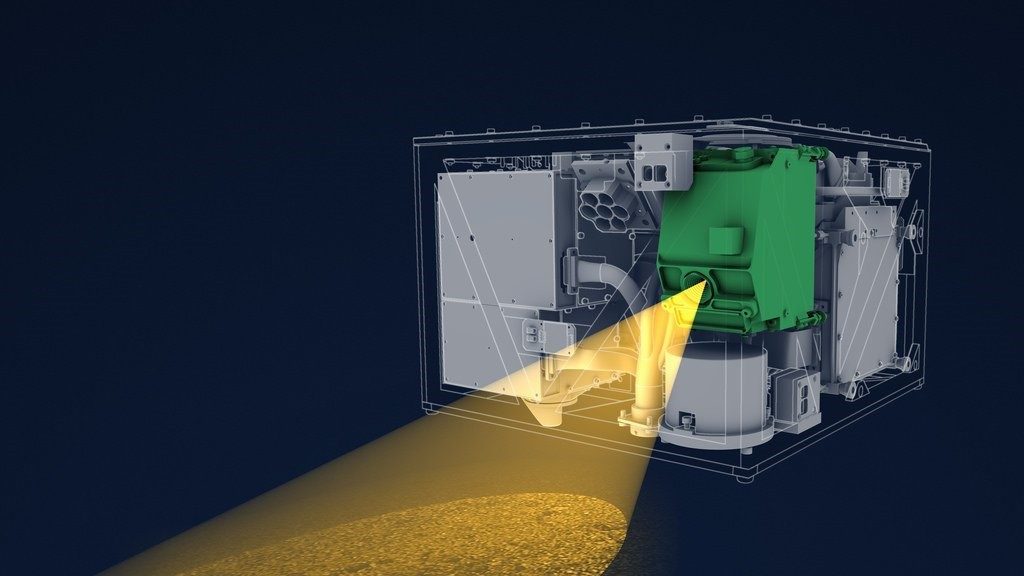
Multispectral imaging during dark phases – when the asteroid’s surface is turned away from the sun – is possible through an illumination device consisting of four arrays of monochromatic LEDs working in 4 spectral bands, centered at B:470nm, G: 530nm, R: 624nm, IR: 805nm.


Imaging Instrumental to the Mission
The MASCOT carries an extremely compact 1024×1024 pixel CMOS camera, designed to cover a large part of the surface in front of MASCOT. The camera is sensitive in the 400-1000 nm wavelength range, peaking at 600-700 nm. Together with the F16 optics, this yields a nominal ground resolution of 150 micron/px at 150 mm distance (diffraction limited).
The camera is mounted slightly tilted inside the lander to take advantage of the Scheimflug principle, keeping everything in focus. The center of its 55° square field-of-view is aimed at the surface at an angle of 22° with respect to the surface plane. This means that both the surface close to the lander and the horizon are in the FOV, when the lander rests on a horizontal surface.
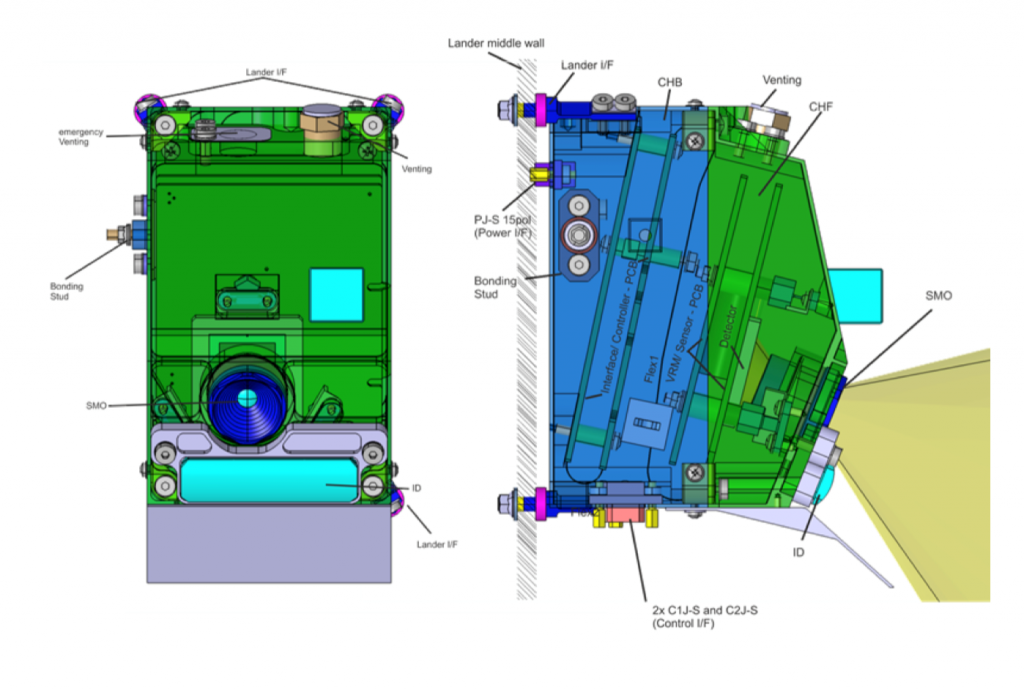
MASCOT also has a robotic arm that allows it to hop around the low-gravity environment of the asteroid in order to obtain better data. To fit in the limited payload mass allocation for MASCOT, the camera optical head including illumination unit and electronics is designed as a highly compact camera with a low mass of 403g. The power consumption is less than 6.4W (during multiband night-time imaging).
Extreme Advances for a Hostile Environment
Launched 37 years earlier, Voyager 1 is currently 11.7 billion miles from Earth. Its narrow and wide-angle vidicon camera tubes offered up the equivalent of 800×800 pixels each, recorded on magnetic tape. Long since shut down to save energy and memory space, they too were custom-built for their mission and performed admirably, giving us some of our first views of our entire solar system from a perspective other than our own on Earth.
Solar winds, cosmic rays, extreme cold, radiation, debris, and Murphy’s law all conspire against each mission we send up into space. Even the original Hayabusa project was not considered a success. But by learning from our mistakes, increasing redundancy, adding in the latest technology available, and not giving up, we’ll continue pushing the limits of what’s possible.
